-
所有
- 加载中...

-


奇妙的麦克纳姆轮
时间:2018年11月09日 信息来源:互联网
麦克纳姆轮是瑞典麦克纳姆公司的专利。这种全方位移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。
依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。在它的轮缘上斜向分布着许多小滚子,故轮子可以横向滑移。小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以该轮能够连续地向前滚动。麦克纳姆轮结构紧凑,运动灵活,是很成功的一种全方位轮。有4个这种新型轮子进行组合,可以更灵活方便的实现全方位移动功能。
中文名
麦克纳姆轮
外文名
Mecanum wheel
专利公司
麦克纳姆公司的专利
国 家
瑞典

麦克纳纳姆轮是一种全向轮,底盘可以向前向后,也可以像螃蟹左右横向移动,原地转动,任何方向的漂移都行,只需要提供X_Y_W_speed的值,就能逆运算出W1、W2、W3、W4四个轮子的转速!!!超级简单。
制作出来的智能车实物图:

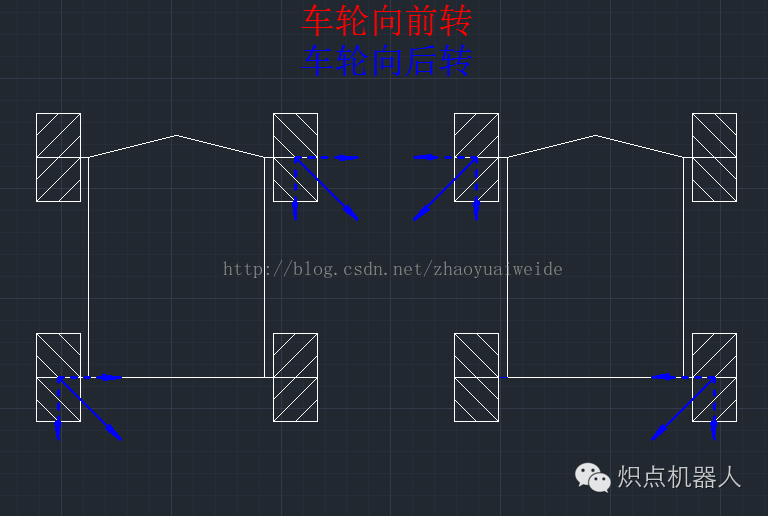
我们来画个受力示意图吧
先来看看前后移动
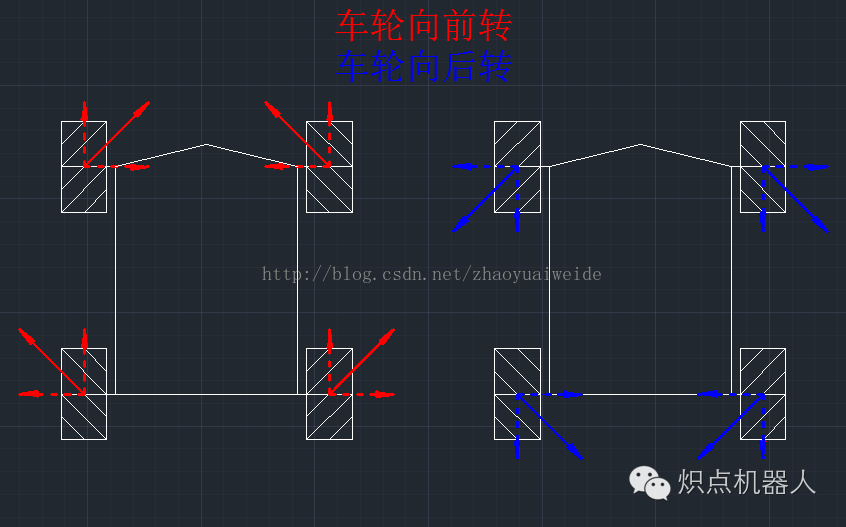
图中红色实线箭头是车轮向前转产生的摩擦力
蓝色箭头是车轮向后转产生的摩擦力
虚线是分力
于是左边的小车就会向前跑,右边的小车会向后跑
接下来我们画原地旋转
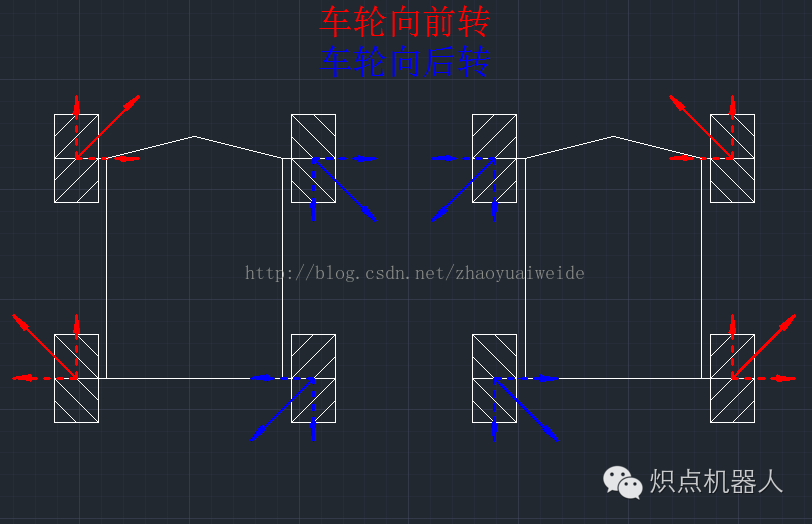
于是左边的小车就顺时针旋转
右边的小车逆时针旋转
让我们再来看看平移
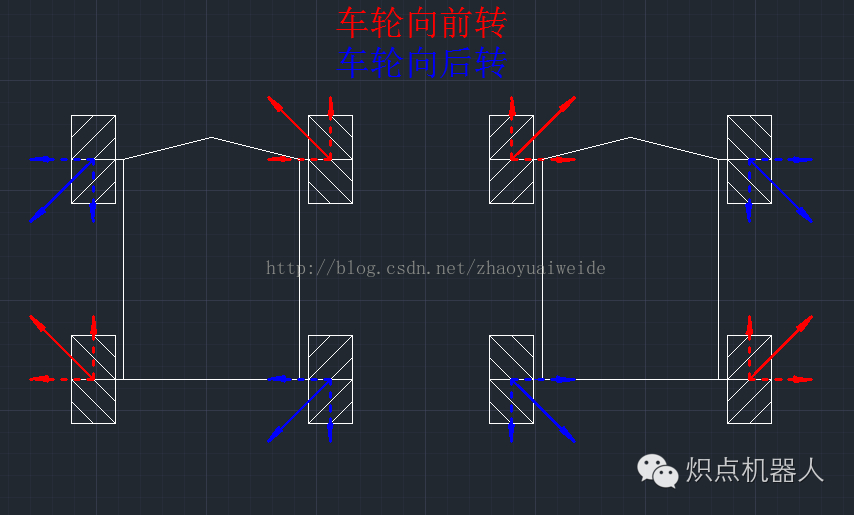
左边的小车向左平移
右边的小车向右平移
接下来看看斜着跑
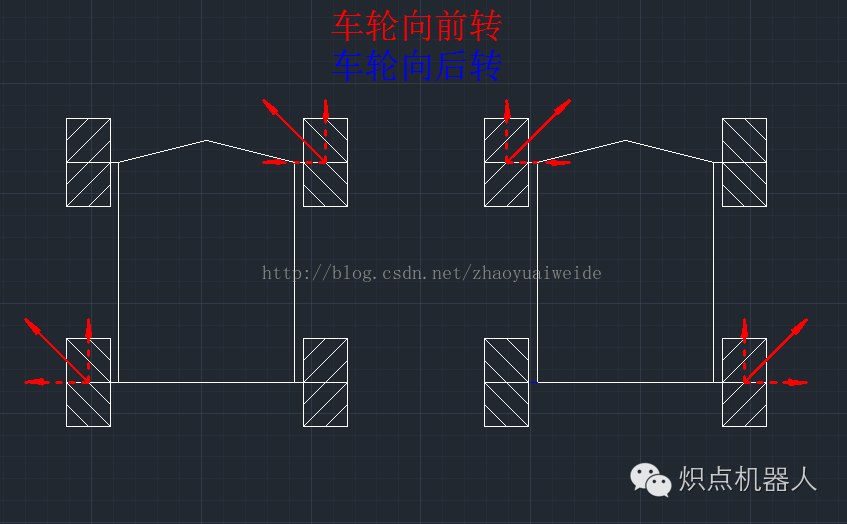
只要同向转动对角线上两个轮子,
就能斜着跑啦
(作者:佚名 编辑:英图济南机器人编程)
最新文章
- 李彦宏:卷 AI 原生应用才有价值,别卷大模型了
- 教育部校外教育培训监管司负责人就《校外培训行政处罚暂行办法》
- 校外培训行政处罚暂行办法
- 第九届山东省“互联网+”大学生创新创业大赛决赛举办
- 历下区人民政府与山东省实验中学全面推进合作办学
- 山东省教育厅关于公布面向中小学生的全省性竞赛活动名单(2023—2
- 人民日报:全国31省市实力TOP5大学!
- 强基计划Q&A!关于入围、校测、志愿录取...你的疑惑这里有答案
- 2023高校强基计划系列攻略之三:关于入围规则
- 20余所高校公布强基计划招生政策!今年有这些新变化
- 关于举办第七届全国青少年无人机大赛的通知
- 2022中国飞行器设计创新大赛决赛拉开帷幕
- 2022 全国青少年信息学奥林匹克联赛(NOIP 2022)开始报名
- 第一届“彩虹杯”全国无人飞行器设计大赛颁奖仪式在青岛举办
- 第六届全国青少年无人机大赛在赣州市举办
推荐文章
- 你生命有多少种可能性,取决于你自己
永远不要相信任何人对我们的任何评价,这样的你,不会在不知不觉中跟魔鬼们签下限制自己的契约。......
- 红杉华兴做媒上瘾 美团大众点评再演老大联姻老二
- 山东省2018年高考文化成绩一分一段表
- 暑假清华需刷脸进门 个人参观要提前7天预约
- 高考放榜日也是复读报名时 毛坦厂中学的复读涡轮
- 美国VS加拿大VS英国 三国留学全方位的对比


