-
所有
- 加载中...

-


在机器人中重现不同动物运动技能的系统
时间:2020年05月03日 信息来源:新浪网
Google Research和加州大学伯克利分校的研究人员开发了一种模仿学习系统,可以在机器人中实现各种敏捷的运动行为。他们的技术发表在arXiv上的一篇论文中,该技术使机器人可以通过模仿动物来获得新技能。
进行这项研究的研究人员之一贾森·彭(Jason Peng)表示:“该项目建立在计算机图形学的一些先前作品的基础上,该图形学通过模仿人体运动捕捉数据来训练模拟角色进行移动。这些技术大多数主要用于仿真,但是在我们最近的项目中,我们迈出了将其应用于真实机器人的第一步。”

Peng和他的同事最初训练了四足机器人,以模仿狗在模拟环境中的运动和行走方式。他们的系统使用称为强化学习的方法接受了从真实狗身上记录的运动数据的训练。
Peng解释说:“模拟训练的优点之一是它非常快,因此我们可以在几天之内模拟数月的训练。一旦对机器人进行了模拟训练,我们就可以使用在现实世界中收集到的几分钟数据,将其学到的东西应用于真正的机器人。”
Peng和他的同事采用的模仿学习方法比设计机器人控制器的传统技术更具扩展性。实际上,与其为一个机器人试图复制的每种技能设计一种新的控制器,他们的方法还可以通过向动物展示一些期望动作的示例,简单地训练机器人以实现特定的运动风格。然后,机器人只需观察这些例子即可自动学习新的运动技能。
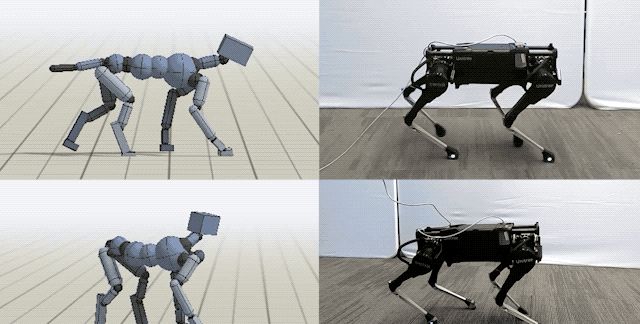
Peng和他的同事在一系列实验中评估了他们的方法,训练了18自由度四足机器人Laikago,以重现不同的动物运动行为,包括不同的奔跑,跳跃和转弯方式。值得注意的是,他们的技术使机器人可以自动合成各种动物运动风格的控制器,从而将在模拟环境中学习到的技能有效地转移到现实世界中。
“对我们来说,最令人兴奋的结果是,相同的基础方法可以学习从步行到动态跳跃和转弯的各种技能,并且在模拟中学习的所有技能也可以转移到真正的机器人上,” Peng说。“这些模仿学习技术可以使为机器人建立大量技能库变得更加容易,从而使它们能够与现实世界更加灵活地移动和交互。”
将来,Peng和他的同事开发的模仿学习系统可以在受动物启发的机器人中实现更多种类的敏捷动作。目前,他们的技术只能使用运动数据进行训练,但研究人员正在尝试进一步开发它,以便它也可以从动物视频中学习。
Peng说:“我们现在有兴趣尝试让机器人模仿不同种类的运动数据,例如视频剪辑。运动捕捉数据有时可能很难记录,尤其是从动物身上记录下来。如果我们只用手机记录一些我们想要的机器人的视频片段,那就太好了。然后让机器人学习如何自动重现这些技能。”
论文标题为《Learning agile robotic locomotion skills by imitating animals》。
(作者:佚名 编辑:英图济南机器人编程)
最新文章
- 李彦宏:卷 AI 原生应用才有价值,别卷大模型了
- 教育部校外教育培训监管司负责人就《校外培训行政处罚暂行办法》
- 校外培训行政处罚暂行办法
- 第九届山东省“互联网+”大学生创新创业大赛决赛举办
- 历下区人民政府与山东省实验中学全面推进合作办学
- 山东省教育厅关于公布面向中小学生的全省性竞赛活动名单(2023—2
- 人民日报:全国31省市实力TOP5大学!
- 强基计划Q&A!关于入围、校测、志愿录取...你的疑惑这里有答案
- 2023高校强基计划系列攻略之三:关于入围规则
- 20余所高校公布强基计划招生政策!今年有这些新变化
- 关于举办第七届全国青少年无人机大赛的通知
- 2022中国飞行器设计创新大赛决赛拉开帷幕
- 2022 全国青少年信息学奥林匹克联赛(NOIP 2022)开始报名
- 第一届“彩虹杯”全国无人飞行器设计大赛颁奖仪式在青岛举办
- 第六届全国青少年无人机大赛在赣州市举办
推荐文章
- 你生命有多少种可能性,取决于你自己
永远不要相信任何人对我们的任何评价,这样的你,不会在不知不觉中跟魔鬼们签下限制自己的契约。......
- 红杉华兴做媒上瘾 美团大众点评再演老大联姻老二
- 山东省2018年高考文化成绩一分一段表
- 暑假清华需刷脸进门 个人参观要提前7天预约
- 高考放榜日也是复读报名时 毛坦厂中学的复读涡轮
- 美国VS加拿大VS英国 三国留学全方位的对比


